| Copyright | (c) Justus Sagemüller 2015 |
|---|---|
| License | GPL v3 |
| Maintainer | (@) sagemueller $ geo.uni-koeln.de |
| Stability | experimental |
| Portability | portable |
| Safe Haskell | None |
| Language | Haskell2010 |
Data.Manifold.TreeCover
Contents
Description
- data Shade x = Shade {
- _shadeCtr :: !(Interior x)
- _shadeExpanse :: !(Metric' x)
- pattern (:±) :: () => WithField ℝ Manifold x => x -> [Needle x] -> Shade x
- data Shade' x = Shade' {
- _shade'Ctr :: !(Interior x)
- _shade'Narrowness :: !(Metric x)
- (|±|) :: WithField ℝ EuclidSpace x => x -> [Needle x] -> Shade' x
- class IsShade shade where
- shadeCtr :: Lens' (shade x) (Interior x)
- occlusion :: (Manifold x, s ~ Scalar (Needle x), RealDimension s) => shade x -> x -> s
- factoriseShade :: (Manifold x, RealDimension (Scalar (Needle x)), Manifold y, RealDimension (Scalar (Needle y))) => shade (x, y) -> (shade x, shade y)
- coerceShade :: (Manifold x, Manifold y, LocallyCoercible x y) => shade x -> shade y
- shadeExpanse :: Lens' (Shade x) (Metric' x)
- shadeNarrowness :: Lens' (Shade' x) (Metric x)
- fullShade :: WithField ℝ Manifold x => x -> Metric' x -> Shade x
- fullShade' :: WithField ℝ Manifold x => x -> Metric x -> Shade' x
- pointsShades :: WithField ℝ Manifold x => [x] -> [Shade x]
- pointsCovers :: forall x. WithField ℝ Manifold x => [x] -> [Shade x]
- intersectShade's :: forall y. Refinable y => NonEmpty (Shade' y) -> Option (Shade' y)
- class WithField ℝ Manifold y => Refinable y where
- data ShadeTree x
- = PlainLeaves [x]
- | DisjointBranches !Int (NonEmpty (ShadeTree x))
- | OverlappingBranches !Int !(Shade x) (NonEmpty (DBranch x))
- fromLeafPoints :: forall x. WithField ℝ Manifold x => [x] -> ShadeTree x
- onlyLeaves :: WithField ℝ Manifold x => ShadeTree x -> [x]
- indexShadeTree :: forall x. WithField ℝ Manifold x => ShadeTree x -> Int -> Either Int ([ShadeTree x], x)
- positionIndex :: forall x. WithField ℝ Manifold x => Option (Metric x) -> ShadeTree x -> x -> Option (Int, ([ShadeTree x], x))
- onlyNodes :: WithField ℝ Manifold x => ShadeTree x -> Trees x
- type SimpleTree = GenericTree Maybe []
- type Trees = GenericTree [] []
- type NonEmptyTree = GenericTree NonEmpty []
- newtype GenericTree c b x = GenericTree {
- treeBranches :: c (x, GenericTree b b x)
- sShSaw :: WithField ℝ Manifold x => ShadeTree x -> ShadeTree x -> Sawboneses x
- chainsaw :: WithField ℝ Manifold x => Cutplane x -> ShadeTree x -> Sawbones x
- class HasFlatView f where
- type FlatView f x
- flatView :: f x -> FlatView f x
- superFlatView :: f x -> [[x]]
- shadesMerge :: WithField ℝ Manifold x => ℝ -> [Shade x] -> [Shade x]
- smoothInterpolate :: (WithField ℝ Manifold x, WithField ℝ LinearManifold y) => NonEmpty (x, y) -> x -> y
- twigsWithEnvirons :: forall x. WithField ℝ Manifold x => ShadeTree x -> [((Int, ShadeTree x), [(Int, ShadeTree x)])]
- completeTopShading :: (WithField ℝ Manifold x, WithField ℝ Manifold y) => (x `Shaded` y) -> [Shade' (x, y)]
- flexTwigsShading :: forall x y f. (WithField ℝ Manifold x, WithField ℝ Manifold y, Applicative f) => (Shade' (x, y) -> f (x, (Shade' y, LocalLinear x y))) -> (x `Shaded` y) -> f (x `Shaded` y)
- data WithAny x y = WithAny {
- _untopological :: y
- _topological :: !x
- type Shaded x y = ShadeTree (x `WithAny` y)
- fmapShaded :: (y -> υ) -> (x `Shaded` y) -> x `Shaded` υ
- stiAsIntervalMapping :: (x ~ ℝ, y ~ ℝ) => (x `Shaded` y) -> [(x, ((y, Diff y), Linear ℝ x y))]
- spanShading :: forall x y. (WithField ℝ Manifold x, WithField ℝ Manifold y) => (Shade x -> Shade y) -> ShadeTree x -> x `Shaded` y
- constShaded :: y -> ShadeTree x -> x `Shaded` y
- stripShadedUntopological :: (x `Shaded` y) -> ShadeTree x
- type DifferentialEqn x y = Shade (x, y) -> Shade' (LocalLinear x y)
- propagateDEqnSolution_loc :: forall x y. (WithField ℝ Manifold x, Refinable y) => DifferentialEqn x y -> ((x, Shade' y), NonEmpty (Needle x, Shade' y)) -> NonEmpty (Shade' y)
- type TriangBuild t n x = TriangT t (S n) x (State (Map (SimplexIT t n x) (Metric x, ISimplex (S n) x)))
- doTriangBuild :: KnownNat n => (forall t. TriangBuild t n x ()) -> [Simplex (S n) x]
- singleFullSimplex :: forall t n x. (KnownNat n, WithField ℝ Manifold x) => ISimplex n x -> FullTriang t n x (SimplexIT t n x)
- autoglueTriangulation :: forall t n n' n'' x. (KnownNat n'', WithField ℝ Manifold x, n ~ S n', n' ~ S n'') => (forall t'. TriangBuild t' n' x ()) -> TriangBuild t n' x ()
- data AutoTriang n x
- elementaryTriang :: forall n n' x. (KnownNat n', n ~ S n', WithField ℝ EuclidSpace x) => Simplex n x -> AutoTriang n x
- breakdownAutoTriang :: forall n n' x. (KnownNat n', n ~ S n') => AutoTriang n x -> [Simplex n x]
Shades
A Shade is a very crude description of a region within a manifold. It
can be interpreted as either an ellipsoid shape, or as the Gaussian peak
of a normal distribution (use http://hackage.haskell.org/package/manifold-random
for actually sampling from that distribution).
For a precise description of an arbitrarily-shaped connected subset of a manifold,
there is Region, whose implementation is vastly more complex.
Constructors
| Shade | |
Fields
| |
Instances
| ImpliesMetric Shade Source | |
| IsShade Shade Source | |
| (Show x, Show (Needle x), WithField ℝ Manifold x) => Show (Shade x) Source | |
| AffineManifold x => Semimanifold (Shade x) Source | |
| (WithField ℝ AffineManifold x, Geodesic x) => Geodesic (Shade x) Source | |
| type MetricRequirement Shade x = Manifold x Source | |
| type Needle (Shade x) = Diff x Source | |
| type Interior (Shade x) = Shade x |
pattern (:±) :: () => WithField ℝ Manifold x => x -> [Needle x] -> Shade x Source
Span a Shade from a center point and multiple deviation-vectors.
A “co-shade” can describe ellipsoid regions as well, but unlike
Shade it can be unlimited / infinitely wide in some directions.
It does OTOH need to have nonzero thickness, which Shade needs not.
Constructors
| Shade' | |
Fields
| |
Instances
| ImpliesMetric Shade' Source | |
| IsShade Shade' Source | |
| (Show x, Show (DualSpace (Needle x)), WithField ℝ Manifold x) => Show (Shade' x) Source | |
| AffineManifold x => Semimanifold (Shade' x) Source | |
| (WithField ℝ AffineManifold x, Geodesic x) => Geodesic (Shade' x) Source | |
| type MetricRequirement Shade' x = Manifold x Source | |
| type Needle (Shade' x) = Diff x Source | |
| type Interior (Shade' x) = Shade' x |
(|±|) :: WithField ℝ EuclidSpace x => x -> [Needle x] -> Shade' x Source
Similar to ':±', but instead of expanding the shade, each vector restricts it. Iff these form a orthogonal basis (in whatever sense applicable), then both methods will be equivalent.
Note that '|±|' is only possible, as such, in an inner-product space; in
general you need reciprocal vectors (Needle') to define a Shade'.
class IsShade shade where Source
Methods
shadeCtr :: Lens' (shade x) (Interior x) Source
occlusion :: (Manifold x, s ~ Scalar (Needle x), RealDimension s) => shade x -> x -> s Source
Check the statistical likelihood-density of a point being within a shade. This is taken as a normal distribution.
factoriseShade :: (Manifold x, RealDimension (Scalar (Needle x)), Manifold y, RealDimension (Scalar (Needle y))) => shade (x, y) -> (shade x, shade y) Source
coerceShade :: (Manifold x, Manifold y, LocallyCoercible x y) => shade x -> shade y Source
Lenses
shadeExpanse :: Lens' (Shade x) (Metric' x) Source
shadeNarrowness :: Lens' (Shade' x) (Metric x) Source
Construction
pointsShades :: WithField ℝ Manifold x => [x] -> [Shade x] Source
Attempt to find a Shade that describes the distribution of given points.
At least in an affine space (and thus locally in any manifold), this can be used to
estimate the parameters of a normal distribution from which some points were
sampled. Note that some points will be “outside” of the shade,
as happens for a normal distribution with some statistical likelyhood.
(Use pointsCovers if you need to prevent that.)
For nonconnected manifolds it will be necessary to yield separate shades for each connected component. And for an empty input list, there is no shade! Hence the result type is a list.
pointsCovers :: forall x. WithField ℝ Manifold x => [x] -> [Shade x] Source
Like pointsShades, but ensure that all points are actually in
the shade, i.e. if [ is the result then
Shade x₀ ex]metric (recipMetric ex) (p-x₀) ≤ 1p in the list.
Evaluation
Misc
intersectShade's :: forall y. Refinable y => NonEmpty (Shade' y) -> Option (Shade' y) Source
class WithField ℝ Manifold y => Refinable y where Source
Class of manifolds which can use Shade' as a basic set type.
This is easily possible for vector spaces with the default implementations.
Minimal complete definition
Nothing
Methods
subShade' :: Shade' y -> Shade' y -> Bool Source
a means subShade' b ≡ Truea is fully contained in b, i.e. from
minusLogOcclusion' a p < 1minusLogOcclusion' b p < 1.
refineShade' :: Shade' y -> Shade' y -> Option (Shade' y) Source
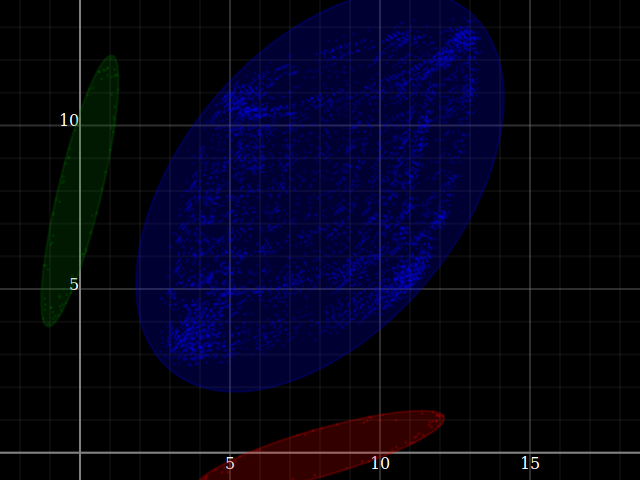
convolveShade' :: Shade' y -> Shade' (Needle y) -> Shade' y Source
If p is in a (red) and δ is in b (green),
then p.+~^δ is in convolveShade' a b (blue).
Shade trees
Constructors
| PlainLeaves [x] | |
| DisjointBranches !Int (NonEmpty (ShadeTree x)) | |
| OverlappingBranches !Int !(Shade x) (NonEmpty (DBranch x)) |
Instances
| ImpliesMetric ShadeTree Source | |
| Generic (ShadeTree x) Source | |
| WithField ℝ Manifold x => Monoid (ShadeTree x) Source | |
| (NFData x, NFData (Needle' x)) => NFData (ShadeTree x) Source | |
| WithField ℝ Manifold x => Semigroup (ShadeTree x) Source | WRT union. |
| AffineManifold x => Semimanifold (ShadeTree x) Source | Experimental. There might be a more powerful instance possible. |
| type MetricRequirement ShadeTree x = WithField ℝ Manifold x Source | |
| type Rep (ShadeTree x) Source | |
| type Needle (ShadeTree x) = Diff x Source | |
| type Interior (ShadeTree x) = ShadeTree x |
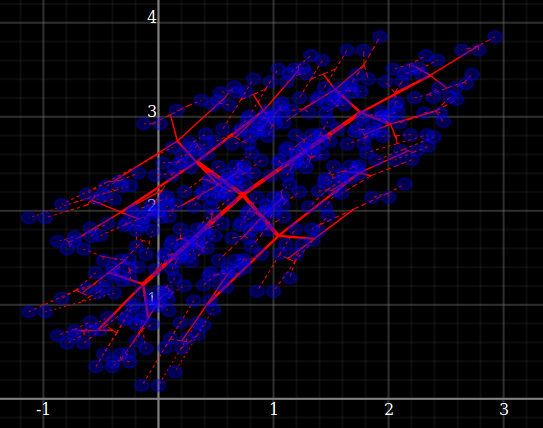
fromLeafPoints :: forall x. WithField ℝ Manifold x => [x] -> ShadeTree x Source
Build a quite nicely balanced tree from a cloud of points, on any real manifold.
onlyLeaves :: WithField ℝ Manifold x => ShadeTree x -> [x] Source
Left (and, typically, also right) inverse of fromLeafNodes.
indexShadeTree :: forall x. WithField ℝ Manifold x => ShadeTree x -> Int -> Either Int ([ShadeTree x], x) Source
The leaves of a shade tree are numbered. For a given index, this function attempts to find the leaf with that ID, within its immediate environment.
Arguments
| :: WithField ℝ Manifold x | |
| => Option (Metric x) | For deciding (at the lowest level) what “close” means; this is optional for any tree of depth >1. |
| -> ShadeTree x | The tree to index into |
| -> x | Position to look up |
| -> Option (Int, ([ShadeTree x], x)) | Index of the leaf near to the query point, the “path” of environment trees leading down to its position (in decreasing order of size), and actual position of the found node. |
“Inverse indexing” of a tree. This is roughly a nearest-neighbour search, but not guaranteed to give the correct result unless evaluated at the precise position of a tree leaf.
View helpers
onlyNodes :: WithField ℝ Manifold x => ShadeTree x -> Trees x Source
Imitate the specialised ShadeTree structure with a simpler, generic tree.
Auxiliary types
type SimpleTree = GenericTree Maybe [] Source
SimpleTreex ≅ Maybe (x,Treesx)
type Trees = GenericTree [] [] Source
type NonEmptyTree = GenericTree NonEmpty [] Source
NonEmptyTreex ≅ (x,Treesx)
newtype GenericTree c b x Source
Constructors
| GenericTree | |
Fields
| |
Instances
| (Functor c, Functor b) => Functor (GenericTree c b) Source | |
| (Foldable c, Foldable b) => Foldable (GenericTree c b) Source | |
| (Traversable c, Traversable b) => Traversable (GenericTree c b) Source | |
| Show (c (x, GenericTree b b x)) => Show (GenericTree c b x) Source | |
| Generic (GenericTree c b x) Source | |
| MonadPlus c => Monoid (GenericTree c b x) Source | |
| (NFData x, Foldable c, Foldable b) => NFData (GenericTree c b x) Source | |
| MonadPlus c => Semigroup (GenericTree c b x) Source | |
| type Rep (GenericTree c b x) Source |
Misc
Arguments
| :: WithField ℝ Manifold x | |
| => ShadeTree x | “Reference tree”, defines the cut regions.
Must be at least one level of |
| -> ShadeTree x | Tree to take the actual contents from. |
| -> Sawboneses x | All points within each region, plus those from the boundaries of each neighbouring region. |
Saw a tree into the domains covered by the respective branches of another tree.
class HasFlatView f where Source
Arguments
| :: WithField ℝ Manifold x | |
| => ℝ | How near (inverse normalised distance, relative to shade expanse) two shades must be to be merged. If this is zero, any shades in the same connected region of a manifold are merged. |
| -> [Shade x] | A list of n shades. |
| -> [Shade x] | m ≤ n shades which cover at least the same area. |
Attempt to reduce the number of shades to fewer (ideally, a single one). In the simplest cases these should guaranteed cover the same area; for non-flat manifolds it only works in a heuristic sense.
smoothInterpolate :: (WithField ℝ Manifold x, WithField ℝ LinearManifold y) => NonEmpty (x, y) -> x -> y Source
twigsWithEnvirons :: forall x. WithField ℝ Manifold x => ShadeTree x -> [((Int, ShadeTree x), [(Int, ShadeTree x)])] Source
completeTopShading :: (WithField ℝ Manifold x, WithField ℝ Manifold y) => (x `Shaded` y) -> [Shade' (x, y)] Source
flexTwigsShading :: forall x y f. (WithField ℝ Manifold x, WithField ℝ Manifold y, Applicative f) => (Shade' (x, y) -> f (x, (Shade' y, LocalLinear x y))) -> (x `Shaded` y) -> f (x `Shaded` y) Source
Essentially the same as (x,y), but not considered as a product topology.
The Semimanifold etc. instances just copy the topology of x, ignoring y.
Constructors
| WithAny | |
Fields
| |
Instances
| AdditiveGroup x => Monad (WithAny x) Source | |
| Functor (WithAny x) Source | |
| AdditiveGroup x => Applicative (WithAny x) Source | |
| (Show x, Show y) => Show (WithAny x y) Source | |
| Generic (WithAny x y) Source | |
| (NFData x, NFData y) => NFData (WithAny x y) Source | |
| AffineSpace x => AffineSpace (WithAny x y) Source | |
| (VectorSpace x, Monoid y) => VectorSpace (WithAny x y) Source | |
| (AdditiveGroup x, Monoid y) => AdditiveGroup (WithAny x y) Source | |
| PseudoAffine x => PseudoAffine (WithAny x y) Source | |
| Semimanifold x => Semimanifold (WithAny x y) Source | |
| type Rep (WithAny x y) Source | |
| type Diff (WithAny x y) = Diff x Source | |
| type Scalar (WithAny x y) = Scalar x Source | |
| type Needle (WithAny x y) = Needle x Source | |
| type Interior (WithAny x y) = WithAny (Interior x) y Source |
fmapShaded :: (y -> υ) -> (x `Shaded` y) -> x `Shaded` υ Source
stiAsIntervalMapping :: (x ~ ℝ, y ~ ℝ) => (x `Shaded` y) -> [(x, ((y, Diff y), Linear ℝ x y))] Source
spanShading :: forall x y. (WithField ℝ Manifold x, WithField ℝ Manifold y) => (Shade x -> Shade y) -> ShadeTree x -> x `Shaded` y Source
constShaded :: y -> ShadeTree x -> x `Shaded` y Source
stripShadedUntopological :: (x `Shaded` y) -> ShadeTree x Source
type DifferentialEqn x y = Shade (x, y) -> Shade' (LocalLinear x y) Source
propagateDEqnSolution_loc :: forall x y. (WithField ℝ Manifold x, Refinable y) => DifferentialEqn x y -> ((x, Shade' y), NonEmpty (Needle x, Shade' y)) -> NonEmpty (Shade' y) Source
Triangulation-builders
type TriangBuild t n x = TriangT t (S n) x (State (Map (SimplexIT t n x) (Metric x, ISimplex (S n) x))) Source
doTriangBuild :: KnownNat n => (forall t. TriangBuild t n x ()) -> [Simplex (S n) x] Source
singleFullSimplex :: forall t n x. (KnownNat n, WithField ℝ Manifold x) => ISimplex n x -> FullTriang t n x (SimplexIT t n x) Source
autoglueTriangulation :: forall t n n' n'' x. (KnownNat n'', WithField ℝ Manifold x, n ~ S n', n' ~ S n'') => (forall t'. TriangBuild t' n' x ()) -> TriangBuild t n' x () Source
BUGGY: this does connect the supplied triangulations, but it doesn't choose the right boundary simplices yet. Probable cause: inconsistent internal numbering of the subsimplices.
data AutoTriang n x Source
elementaryTriang :: forall n n' x. (KnownNat n', n ~ S n', WithField ℝ EuclidSpace x) => Simplex n x -> AutoTriang n x Source
breakdownAutoTriang :: forall n n' x. (KnownNat n', n ~ S n') => AutoTriang n x -> [Simplex n x] Source